Ausgangspunkt
Ich bin von der DDF-Methode begeistert und habe erste Erfolge zu verzeichnen. Daher möchte ich Euch hier davon berichten.
Nachdem ich mit ketogener Ernährung ca. 25 kg Gewicht verloren habe, dann aber nicht mehr weiter kam und auch sportlich scheinbar nicht so leistungsfähig wie gewünscht war, suchte ich nach einer besseren Möglichkeit das Ernährungs–/Gewichts- und Fettproblem zu lösen.
Zwischenzeitlich nahm ich wieder ca. 5 kg zu. Dann schwenkte ich zu mehr Kohlenhydrate um die Leistungsfähigkeit im Sport zu verbessern. Schließlich wurde ich auf DDF aufmerksam.
Wie funktioniert es
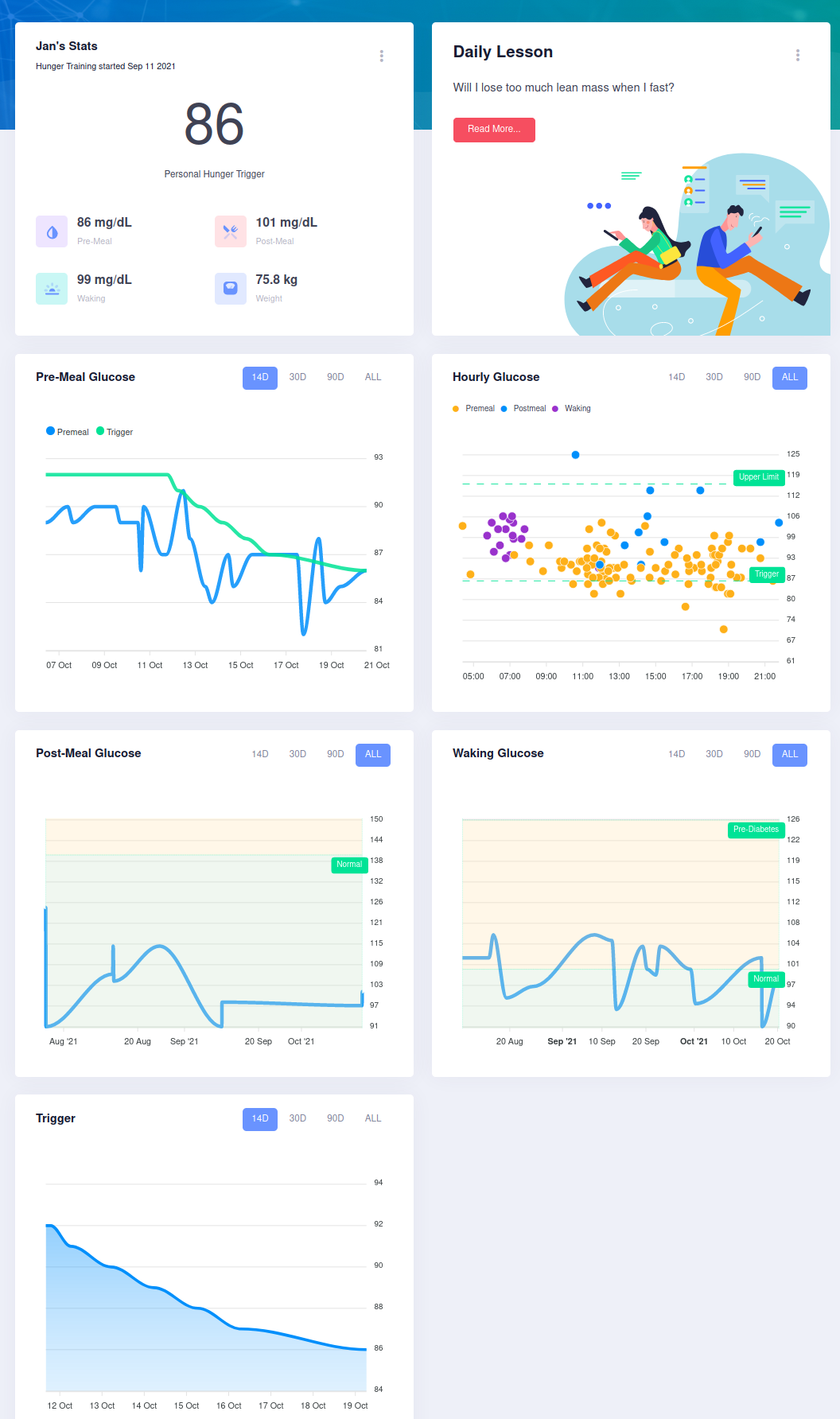
DDF funktioniert mit Hilfe eines Blutzuckermessgerätes. Im Prinzip ist man nur, wenn ein sogenannter Triggerwert der Glukose im Blut erreicht wurde, nach dem gefastet bzw. nichts gegessen wurde. Die Autoren kamen zum Schluss, dass 2-3 Mahlzeiten am Tag besser sind als langes Fasten. Der Triggerwert wird mit Hilfe einer Tabelle oder App berechnet und gezielt langsam verringert. Das Blutzuckermessgerät ist quasi eine Tankanzeige. Sie signalisiert, wenn der Tank leer ist (der Trigger erreicht ist), man damit in der Fettverbrennung war und man tatsächlich Hunger hat. Damit wird dann das zu viele Essen durch falsche Hungersignale unterbunden. Die Folge ist, dass man abnimmt. Am Anfang hatte ich durchaus Hunger-aber es war machbar-da der Trigger vom persönlichen Ausgangspunkt startet. Bei Hunger hilft schwarzer Kaffee, auch entkoffeiniert und Wasser.
Gegessen wird sehr proteinreich, mindestens 40 % und wenig Fett. Kohlenhydrate sind erlaubt. Entscheidend ist der Stoffwechsel und die Bewegungshäufigkeit. Es gibt ein Tool zur Berechnung. Beides, Kohlenhydrate und Fett sind sehr ungünstig. DDF bietet die kostenlose Nutzung mit der Tabelle, aber auch regelmäßige Challenges die kostenpflichtig sind. Dafür steht dann eine App zur Verfügung. Außerdem gibt es einen englischen Kanal auf Facebook. Den Einstieg zu DDF findet man hier. Es gibt weitere Informationsquellen, wie Handbücher, Rezepte u. a. Hilfsmittel.
Wenn das Zielgewicht erreicht ist, wird der Trigger um 10 Punkte nach oben gesetzt. Damit soll man dann das Gewicht halten können. Man muss natürlich nicht immer den Blutzucker messen. Ziel ist, dass man seinen normalen Hunger wieder erkennt durch Gefühle und Signale des Körpers und sich dann wieder mehr ohne Messung ernährt.
Erste Erfolge
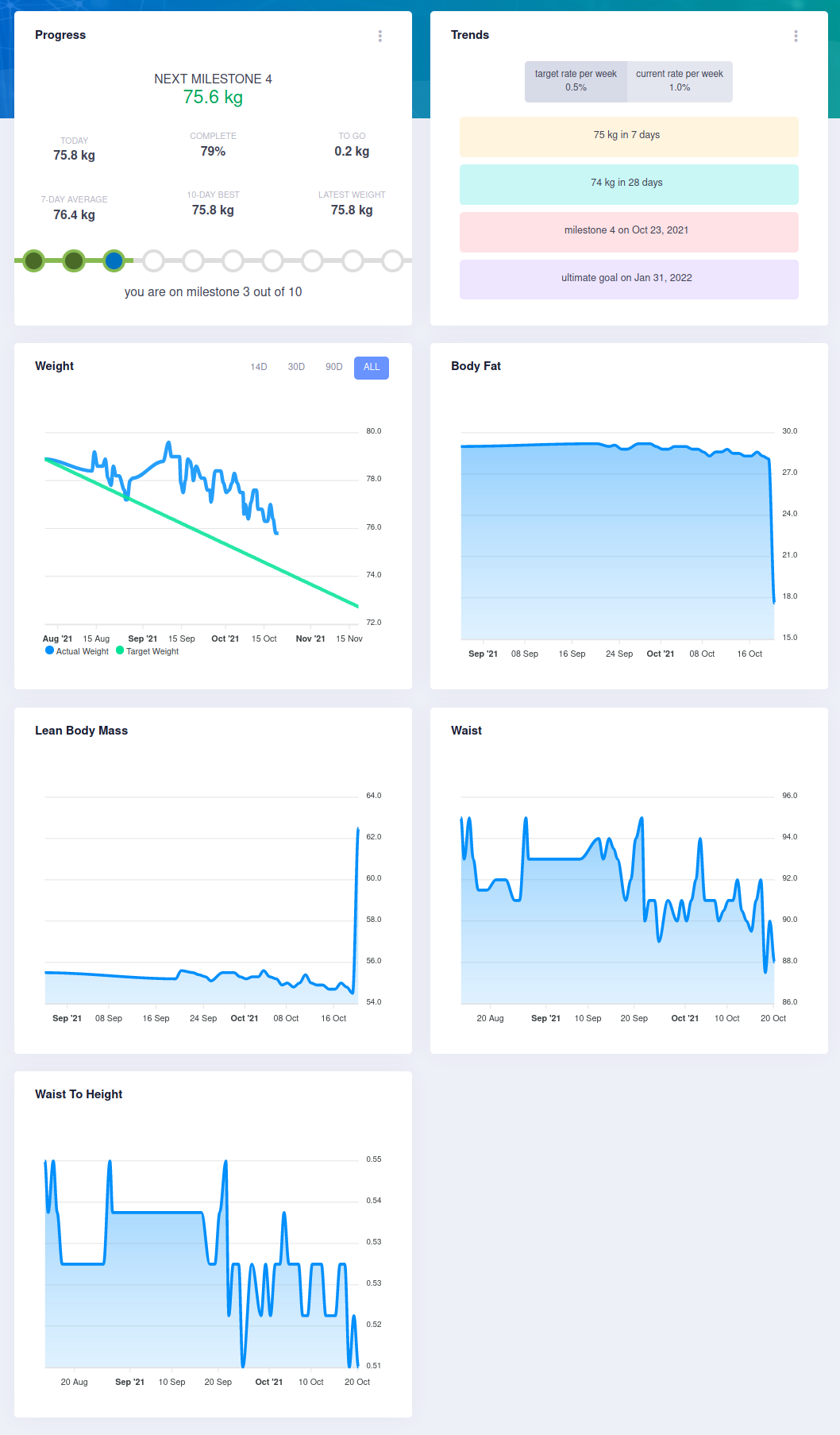
Ich habe die ersten Kilos verloren. Der Körperfettanteil liegt derzeit bei ca. 19 %. Ich hatte anfangs die Fettwaage benutzt-wird so von DDF als Hilfsmittel empfohlen. Meine war aber leider sehr ungenau. Daher habe ich jetzt die Caliper-Methode in Anwendung. Der Waist To Height liegt bei 0,51 – Ziel ist 0,5. Der Bauchumfang hat sich von ca. 95 auf 88 cm verringert.
Fazit
Ich finde es einfach genial. Marty Kendall-der Urheber betreibt hohen Aufwand. So wie ich es herausgelesen habe, ist er Autodidakt. Er hat sich mit dem Thema umfassend beschäftigt-um seiner Ehefrau zu helfen. Ich kann mir gar nicht ganz vorstellen, dass man so eine tolle Idee als „Betriebsfremder“ entdecken kann.
Am Anfang habe ich die Dokumentation immer wieder gelesen. Etwas müßig ist, dass es nur in englischer Sprache zur Verfügung steht. Dafür gibt es aber Hilfsmittel.
Mal schauen, wie es weiter geht. Ich halte Euch auf dem Laufenden 🙂