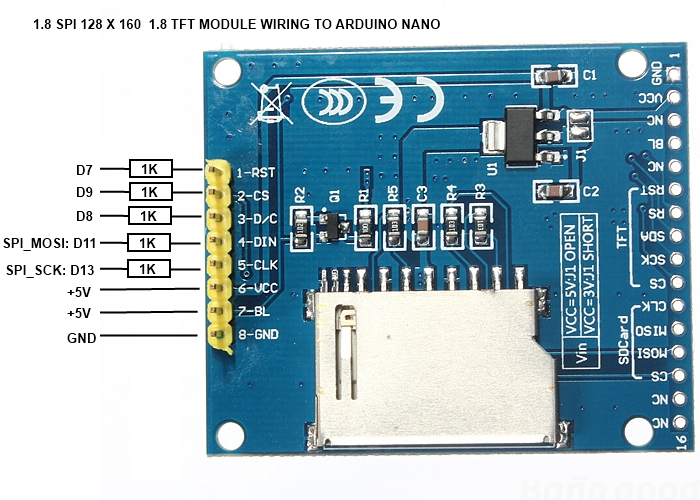
Hier nun mal ein Sketch um die Werte live auf einem preiswerten TFT-Display anzuzeigen.
/*
Arduino TFT text example
http://www.arduino.cc/en/Tutorial/TFTDisplayText
*/
#include <TFT.h> // Arduino LCD library
#include <SPI.h>
// pin definition for the Uno
#define cs 10
#define dc 9
#define rst 8
// pin definition for the Leonardo
// #define cs 7
// #define dc 0
// #define rst 1
// create an instance of the library
TFT TFTscreen = TFT(cs, dc, rst);
// char array to print to the screen
char sensorPrintout[6];
void setup() {
// Put this line at the beginning of every sketch that uses the GLCD:
TFTscreen.begin();
// clear the screen with a black background
TFTscreen.background(0, 0, 0);
// write the static text to the screen
// set the font color to white
TFTscreen.stroke(255, 255, 255);
// set the font size
TFTscreen.setTextSize(2);
// write the text to the top left corner of the screen
TFTscreen.text("Sensor Value :\n ", 0, 0);
// ste the font size very large for the loop
TFTscreen.setTextSize(5);
#define AIQ_SENSOR_ANALOG_PIN 5
}
void loop() {
//CO2
unsigned long duration = pulseIn(AIQ_SENSOR_ANALOG_PIN, HIGH, 2000000);
//Serial.print(duration/1000); Serial.println(" ms ");
//from datasheet
//CO2 ppm = 2000 * (Th - 2ms) / (Th + Tl - 4ms)
// given Tl + Th = 1004
// Tl = 1004 - Th
// = 2000 * (Th - 2ms) / (Th + 1004 - Th -4ms)
// = 2000 * (Th - 2ms) / 1000 = 2 * (Th - 2ms)
long co2ppm = 5 * ((duration/1000) - 2);
Serial.print(co2ppm);
String sensorVal = String(co2ppm);
sensorVal.toCharArray(sensorPrintout, 6);
TFTscreen.stroke(255,255,255);
TFTscreen.text(sensorPrintout, 20, 50);
delay(1000);
TFTscreen.stroke(0,0,0);
TFTscreen.text(sensorPrintout, 20, 50);
}