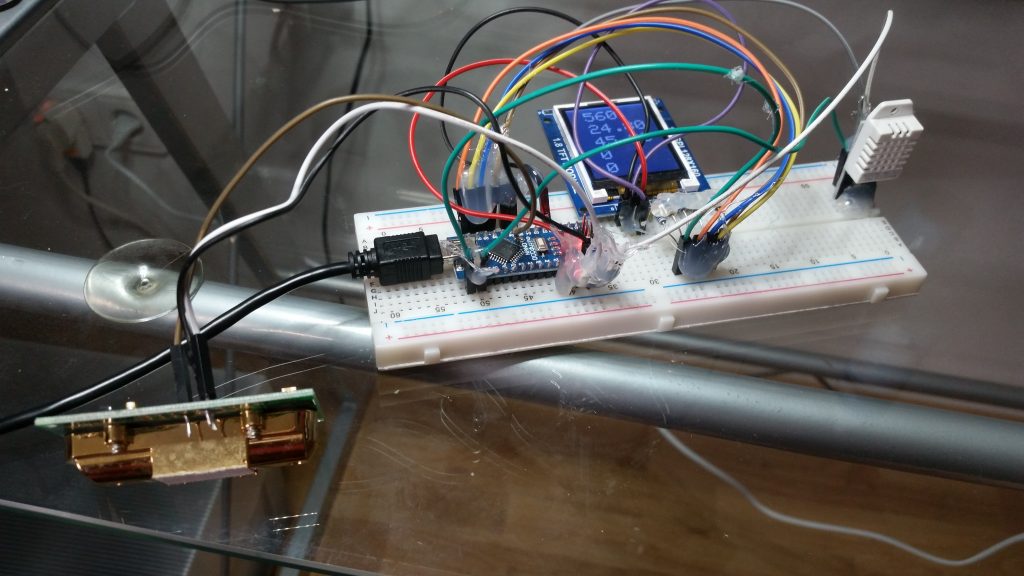
Heute habe ich den CO2-Sensor für das Büro meiner Gutsten mit Heißkleber befestigt, da der fliegende Laborplatine doch sehr wacklig ist. Ich habe mich dann nicht ganz leichten Herzens für das Verkleben entschieden – na ja ich habe es ihr und den Kollegen geschenkt-damit sie nicht im Büro-und Werkhallenmief arbeiten müssen.
Im Foto unten ist ein USB-Reiseladeadapter zu sehen (von EBAY), der beim Versuch der Annäherung mit einem USB-Kabel explodierte. Wahrscheinlich hat einfach eine Überspannung das Knall verursacht. Es waren schwarze Färbungen an beiden Teilen (Stecker und Buchse) zu sehen. Eigentlich wollte ich den Lader öffnen, aber ich habe mich nicht überwunden-keine Lust. Ich habe den nicht mal auf Funktion getestet.